深圳市软赢科技有限公司


|
|
 软件运动控制
SoftServo的“软件运动控制”使用软件替代硬件控制器,起源于美国麻省理工学院的“下一代开放式数控系统”项目,并获得了美国专利(US6826434)。
概述 SoftServo利用软件实现所有的运动控制功能,不需要任何运动控制卡或者专用芯片,所有运算都在通用计算机的CPU上完成,充分发挥目前CPU的超高速、超精确(双精度浮点运算)的运算能力。随着CPU的速度和性能的提高,软件运动控制系统的速度和性能也随之提高。
软件运动控制的算法运行在硬实时软件RTX上。RTX底层可将微软Windows改造成实时操作系统。RTX直接对硬件进行管理,因此不需要DSP等硬件芯片也能保证微秒级的硬实时。这个多任务/多线程实时软件架构使得对实时性要求苛刻的伺服运动控制程序也可以在单一的CPU上运行。SoftServo软件运动控制系统中已经包含有配置好的RTX实时子系统。
CPU可以同时完成所有实时伺服和其它控制任务,包括闭环控制、加减速、多轴联动、PLC、G代码执行、NC路径生成,并提供图形化用户界面、程序的编译/加载、文件管理、数据处理、网络通信。多轴高速伺服环路在单个CPU内部进行闭环,可获得高速高精度的运动控制。因此,客户不用受制于硬件系统对轴数的限制,不用付出昂贵的硬件扩展成本,只用更改软件,就可以实现多达64轴的实时运动控制。 软件架构
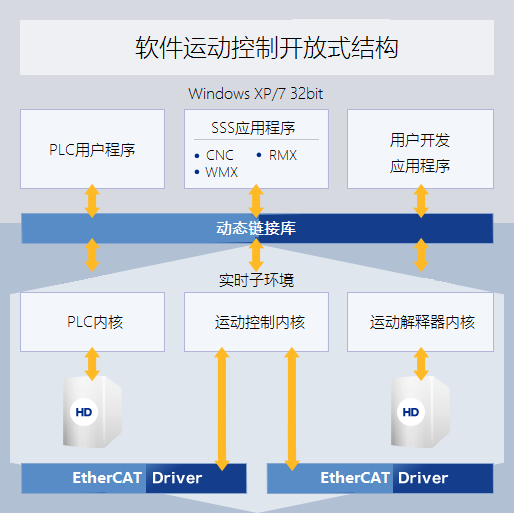
在单个通用CPU的硬件上,系统软件架构由三层构成。 1.下层为运动控制的实时层,通过实时子系统的扩展,使得通用的操作系统有了硬实时的能力。实时层直接同CPU通讯,被CPU赋予最高级别的独占的中断优先级。这一层由3个实时模块组成:运动控制内核、PLC内核、解释器内核。运动控制内核是实时层的核心,它负责对所有的任务进行调度,对其它内核提供接口,负责完成与上层的用户数据和命令交换、与解释器内核完成运动数据的缓存处理和执行、与PLC内核完成PLC 输入输出数据的交换、与总线主站完成总线通讯的建立和中止以及伺服和输入输出数据的交换。 2.中间层为实时动态链接库层,它为实时层和通用操作系统下的用户应用提供接口,将用户数据和指令传输到实时层进行处理,并将结果反馈给用户应用层。这些数据、反馈和指令包括设备控制、系统初始化、参数设置、数控系统控制指令、手动操作指令、自动操作指令、测试和采样数据、输入输出指令、PLC指令、数控和伺服状态监测等。
3.上层为操作系统层。用户数据和应用在操作系统层运行,通过高级语言对运动控制和逻辑函数库和第三方函数库的调用,用户可以开发出各种控制系统应用。
操作系统 SoftServo的运动控制软件(包含实时内核)可以运行在微软公司的Windows XP和Windows 7上(32位/64位)。无论是操作还是开发,Windows系统都给于了开发者和用户最短的适应和开发周期,提供了最友好的操作界面和最大的扩展性。 实时子系统 众所周知,Windows是非实时的操作系统,无法直接用来进行严苛的运动控制。通过RTX,可以将 Windows 转变成实时操作系统 (RTOS)。 通过在操作系统上添加实时的,先占式的多任务机制,RTX使得Windows可以实现实时的开发和处理高性能、硬实时特性的关键任务。计时精度可达1微秒。中断延迟(IST latencies)小于10微秒。因此,同一台电脑上,操作系统可以同时进行实时和非实时的任务处理,并且Windows进程无法干涉实时进程的运行。 运动控制内核 运动控制内核是整个软件架构的基础与核心。位置环和速度反馈环可以在运动控制内核中进行闭环控制(根据控制模式和伺服控制周期的不同)。
软PLC内核 软PLC内核与运动控制内核无缝集成,协作执行PLC顺序程序。
运动解释器内核
优势 1.创新性和经济性
2.强大的性能
3.定制化和可扩展
4.简单快速的系统集成
5.灵活的硬件组合
|