WMX3 Windows版本 ---Profile Mode运动控制模式WMX3 Windows版本 ---Profile Mode运动控制模式 我公司新推出了WMX3 Windows版本,是一种直接安装在Windows操作系统中,更具性价比的通用运动控制软件,使用EtherCAT的Profile位置/速度/扭矩控制模式(PP/PV/TQ),可以组成经济型总线控制方案。 在上一篇里我们讲述了WMX3 Windows版本架构,特点与适用案例。 文章链接:https://mp.weixin.qq.com/s/YZy7wHk49zctFm6QFu-qWg 这次将带来WMX3 Windows版本的安装操作步骤、具体功能与样例程序,让您开始了解软件的真正使用,安装包下载链接附于文章底部。 安装说明 1.打开WMX3安装包,选择WMX3 Install.exe双击开始安装。
2.单击 Install按键。WMX3 Window版本为一键式安装,在每一步点击Install等待安装完成即可,无需选择可选项文件和额外配置。
注:WMX3 Windows版本分为正式版和评估版。评估版不需要注册,但是总线通讯会每小时自动断开并给出警报。正式版WMX3 Windows的注册请联系我公司业务人员。 WMX3 Windows版功能: WMX3 Windows版本的使用方法与RTX版本相同,各部分功能与库函数也基本一致,主要不同在新增Profile Mode(包括PP.PV.TQ模式运动控制)。以下比较表通用于WMX3_V3.4u1_Win_64bit及以上版本。 1.功能比较
2.模式比较:
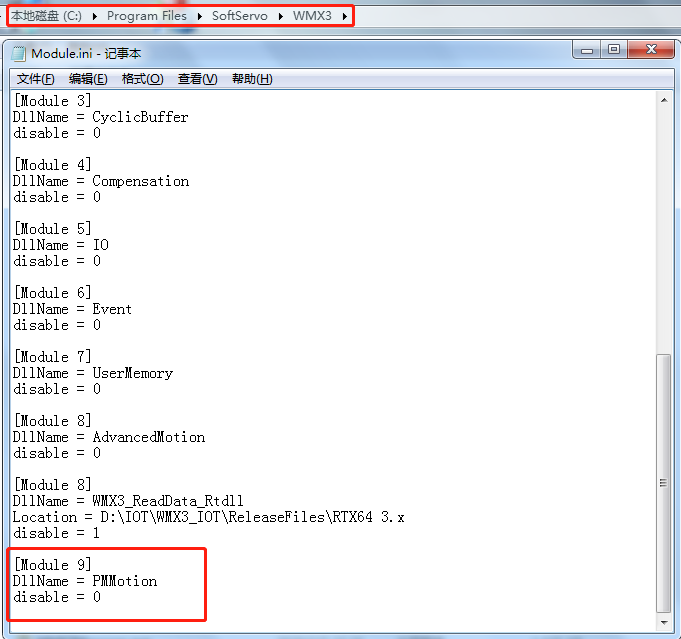
注:PP.PV.TQ.HM模式的调用请参考WMX3函数手册CoreMotion API。 步骤 下面以C#语言在Profile Mode中的PP模式下控制轴0运动程序为例,展示具体步骤。 系统环境:Windows7 SP1 软件版本:WMX3_V3.4u1_Win_64bit Visual Studio 2012 编程语言:C# 1. 加载PMMotion.rtdll 打开module.ini文件(默认位置"C:\ProgramFiles\SoftServo\WMX3") 添加以下设置,使得启动WMX3Engine时加载Profile Mode模块。 [Module 9] DllName = PMMotion disable = 0
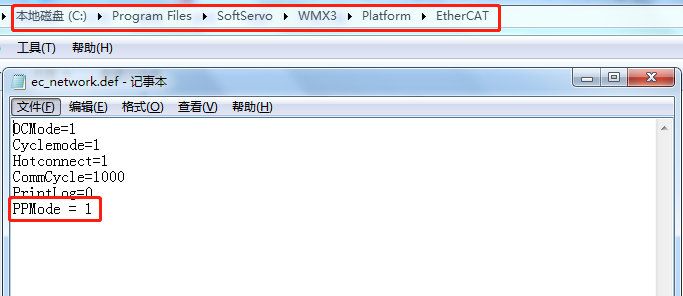
注:如果PMMotion.rtdll 文件不在WMX3安装目录Motion文件夹中,请指定该文件的位置Location = … 2.Profile Mode配置 目前,只有EcPlatform 支持Profile Mode。打开ec_network.def文件(默认位置"C:\ProgramFiles\SoftServo\WMX3\Platform\EtherCAT")添加以下设置以启动 Profile Mode。 PPMode = 1
注:“Cyclic mode”和“Profile Mode”不可能同时应用于网络。当“Profile Mode”被应用时,DCMode将自动关闭。 3.添加下面的示例代码,具体作用为创建设备,开启通讯,开启轴0使能,通过PP模式控制轴0运动到命令位置。 using System; using System.Threading; using WMX3ApiCLR; namespace CSharpAPISample { class ApiBufferMotion { static WMX3Api Wmx3Lib = new WMX3Api(); static PMMotion pmmotion = new PMMotion(Wmx3Lib); static PMMotionStatus PmStatus = new PMMotionStatus(); static void Main(string[] args) { Console.WriteLine("Program Start"); Thread.Sleep(1000); InitializeFunc(); PMAxisMotion.PosCommand PMCmd = new PMAxisMotion.PosCommand(); PMCmd.Profile.Type = WMX3ApiCLR.ProfileType.Trapezoidal; PMCmd.Axis = 0; PMCmd.Target = 500000; PMCmd.Profile.Velocity = 200000; PMCmd.Profile.StartingVelocity = 0; PMCmd.Profile.EndVelocity = 0; PMCmd.Profile.Acc = 2000000; PMCmd.Profile.Dec = 2000000; PMCmd.Profile.JerkAcc = 1000; PMCmd.Profile.JerkAccRatio = 0.5; PMCmd.Profile.JerkDec = 1000; PMCmd.Profile.JerkDecRatio = 0.5; pmmotion.Motion.StartMov(PMCmd); Thread.Sleep(5000); Console.WriteLine("End Recording. (It will run in 5 seconds.)"); Thread.Sleep(5000); FinalizeFunc(); Console.WriteLine("Program End"); Thread.Sleep(3000); } private static void InitializeFunc() { Int ret=Wmx3Lib.CreateDevice("C:\\Program Files\\SoftServo\\WMX3\\", DeviceType.DeviceTypeNormal 0xFFFFFFFF); ret=Wmx3Lib.StartCommunication(0xFFFFFFFF); ret = pmmotion.AxisControl.SetServoOn(0, 1); while (true) { pmmotion.GetStatus(ref PmStatus); if (PmStatus.AxesStatus[0].ServoOn) { break; } System.Threading.Thread.Sleep(100); } } private static void FinalizeFunc() { pmmotion.AxisControl.SetServoOn(0, 0); while (true) { pmmotion.GetStatus(ref PmStatus); if (!PmStatus.AxesStatus[0].ServoOn) { break; } System.Threading.Thread.Sleep(100); } Wmx3Lib.StopCommunication(0xFFFFFFFF); Wmx3Lib.CloseDevice(); } } } 4.连接驱动器和电机,运行程序,打开PMMotionController监控轴0的运动。 WMX3 Windows版本下载链接 https://drive.weixin.qq.com/s?k=ANIAOwfvAAcs6HbaXWAK4ACwbfAHU 复制链接到浏览器打开,即可免费下载最新版本的WMX3 Windows版安装包
文章分类:
公司新闻
|