咨询及服务电话
0755-23014490
什么是软件运动控制?
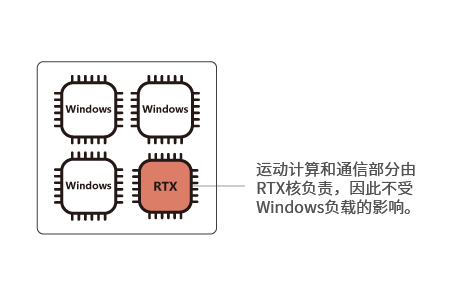
实时操作系统RTX独占CPU的一个核用于实时控制算法,使得实时性不受Windows其他任务的影响。
详情请点击►
Windows可以实现实时控制吗?
通过安装实时操作系统RTX,可以确保Windows系统电脑的实时性。将电脑多核CPU的一个专用核和专用内存分配给软件运动控制,可以实现高速稳定的实时控制,而不会受到Windows进程的影响。RTX因其高可靠性可用于航空工业和医疗器械等领域,同时也被世界各地众多设备制造商广泛采用。
案例展示